

Radar fitted with ARPA.
As mentioned previously, most radars today are equipped with ARPA. ARPA performs many of the functions covered in the radar module automatically and continuously. This saves the officer of the watch from having to do so manually and enables him to focus on his other duties. What are the capabilities of ARPA?
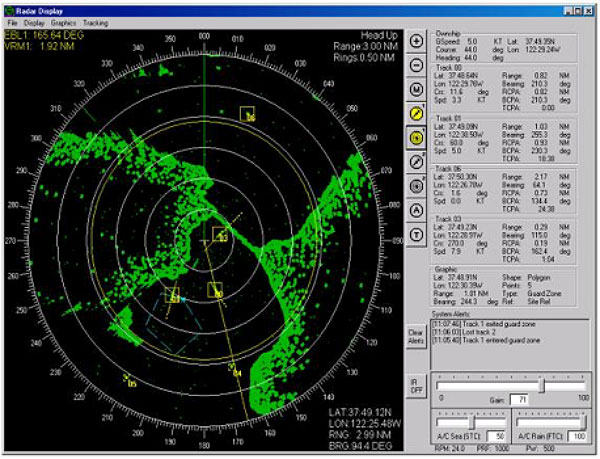
Another radar fitted with ARPA.
Capabilities:
- It can track targets much faster and requires less plotting interval.
- Twenty or more targets can be tracked at a time.
- Vectors are displayed and constantly updated, so the situation is graphically displayed with the latest information.
- Full details regarding each target being plotted can be displayed on command.
- The history of each target’s movement can be graphically displayed.
- It automatically acquires targets for tracking, which otherwise might have been missed by the officer of the watch.
- It provides a warning in the event of collision risk, loss of target, target entering a guard zone, etc.
- It provides a facility to predict the outcome of a manoeuvre under consideration.
Display of plotting data.
Apart from the basic display of bearing and range of each target normally displayed by the radar, additional information is required to determine risk of collision and the avoiding action to be taken. ARPA can provide this information automatically. When graphic information is displayed, risk of collision will become apparent with the use of relative vectors. If more detailed information is required for decision making, then true vectors can be used. ARPA will start plotting targets either if acquired manually through the use of a joystick or similar pointing device, or by any target entering a predetermined zone. Once a target is acquired, it will continue to be plotted until it is removed by the operator. ARPA will display the following information:
- Relative vectors. This information is displayed relative to the observer’s vessel. The length of the vector relates to a time interval and it’s direction will indicate it’s closest point of approach. The relative vector is therefore the OA line in a plotting triangle. If the direction of the vector points towards own ship, then risk of collision exists. Both the time interval represented by the vector and the length of the vector can be altered by the operator.
- True vectors. True vectors represent the WA line of a plotting triangle. The length of each vector represents the distance the target will travel during the selected interval and its direction represents the true course of the target. In true vector display, the observer’s own ship also displays its own true vector. Risk of collision in this mode can be recognised if the end of the target’s vector lies in a direction which points to the end of the observer’s own true vector.
- History of the target. The progress of the targets on the screen can be displayed by invoking a history analysis (time-spaced dots representing past positions of the target). It should be noted that various inputs of the data to the ARPA cause the short term display to alter continuously. For this reason, any change in the target’s course or speed might not be immediately apparent. The history analysis is of importance in this case.
- Potential collision points. Some manufacturers feature Points of Potential Collision (PPC’s) or predicted Areas of Danger (PAD’s) which are locations or areas highlighted on the screen where collisions could occur, thus prompting the officer of the watch to avoid them.
- Numerical data of each target. A full report of each target can be called up, giving details of the target’s CPA, TCPA, course and speed. It is continuously being updated by the computer, so it will always be recent and valid.
- Trial manoeuvres. It is possible to display a hypothetical situation on the radar screen (either in true vectors or relative vectors) resulting from an alteration being contemplated involving the course and/or speed of the observer’s own vessel. In this way a rapid decision can be reached and executed in confidence. This does not mean however, that further close monitoring after performing the manoeuvre would no longer be necessary.
Other ARPA facilities:
- Guard zones. Ares on the screen which can be considered to be more important by the operator can be demarcated in order to alert the officer to the presence of previously undetected targets that have entered this zone.
- Area rejection boundaries. Areas can be selected where automatic acquisition is inhibited. In congested traffic, this has the advantage of allowing more room in the processor’s memory for plotting target’s elsewhere.
- Alarms. Also called operational warnings. The operator is alerted:
- whenever a target presents a danger of collision or close quarters situation;
- if a target enters a guard zone;
- whenever a target is lost;
- if data is incorrectly entered by the operator; and
- it can sound an alarm to indicate system malfunctions.
- Ground referencing. The secret of accurate plotting and forecasting is the accuracy of the ship’s own speed and course fed into the processor. One option is to feed the data in manually, based on the observation of the navigator. However this can be burdensome. The facility of linking the velocity computations to a fixed target, such as a buoy or an identifiable prominent stationary topographical feature, will provide the computer with a known zero speed reference. With a ground reference display, land echoes will seem to drift.
- Navigational lines. Lines and mapping details can be prepared and stored for future use which delineate channels, course lines, traffic separation schemes, navigational hazards, approach limits, etc. When ground referencing is invoked, the coast appears to drift and maps become displaced relative to the coastline.
- Integrated navigation. The digital data from the ARPA can be fed via NMEA connectors to a fully integrated navigation system such as ECDIS on the bridge. Thus electronic charts can be superimposed on the radar screen and acquired targets can be represented on electronic charts. Other systems such as AIS can also be connected to the integrated system, providing information regarding the identification, course, speed, intentions, destination, etc can also be displayed.
Errors and problems of an ARPA.
Certain inaccuracies in the ARPA plot could be caused by input errors, i.e. from the radar. Others could be errors in the computations and errors of interpretation.
- Radar errors. These could be:
- bearing errors;
- range errors;
- gyro errors,
- course errors; and
- speed errors.
- ARPA errors. These could be:
- Random track errors. These are caused by input errors from the radar which causes unstable computations and erratic target behaviour.
- Target swap. When targets become very close to one another it could confuse the ARPA computer and cause it to swap the data computed for one to the other vessel.
- Target loss. The target data may be transferred to a transient echo (sea clutter) which then disappears.
- Missed targets. Weak echoes might miss the attention of the automatic acquisition facility.
- Ground referencing problems. When a vector is computed from ground referenced data, the track relates to the ship’s and the target’s movement over the ground. There is no way therefore to gauge the effect of the current on the vectors and the aspect of the target could be affected.
- Interpretational errors. These could be:
- Misreading a relative vector to indicate a true course and speed, or trying to obtain a CPA from a true vector.
- Relying too much on presented data can be dangerous. All machines can have faults and if this is not taken into account, the consequences could be dangerous.